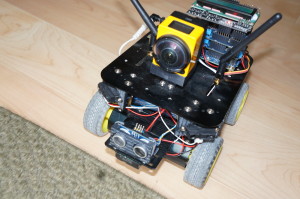
This was our first home project making a robot. We started this in March before we had a blog. The concept was to create a wheeled device that could drive itself around the house similar to our Roomba. At first we used a webpage to control the direction. The we added sensors to detect the walls and then another sensor facing down to detect the ledge. Eventually it was driving itself around the house. This gave rise to the idea of making a movie about Roomba and the new robot.
Later on we added a mount for a WiFi enabled camera to have remote robot vision. We tried a Sony camera on a servo that look at objects when they got close. However, we like the 360 view of the Kodak PixPro that could see in all directions at once better.
- 1 DFrobot 4WD
- 1 Intel Galileo1 board
- 2 Adafruit motor/servo shield
- Sainsmart 16×2 LCD keypad
- Intel WiFi adapter
- half to full height mini card adapter
- 2 antenna
- battery: 9.6V 2A NiMH rechargable
- 3 IR distance sensor
- 1 Ultrasonic distance sensor
- RC servo
- 3D printed camera mount adapter
- cameras tried: Sony DSC-QX10 and Kodak PixPro SP360
-

- Before Adding Sensors and Keypad

Related Posts