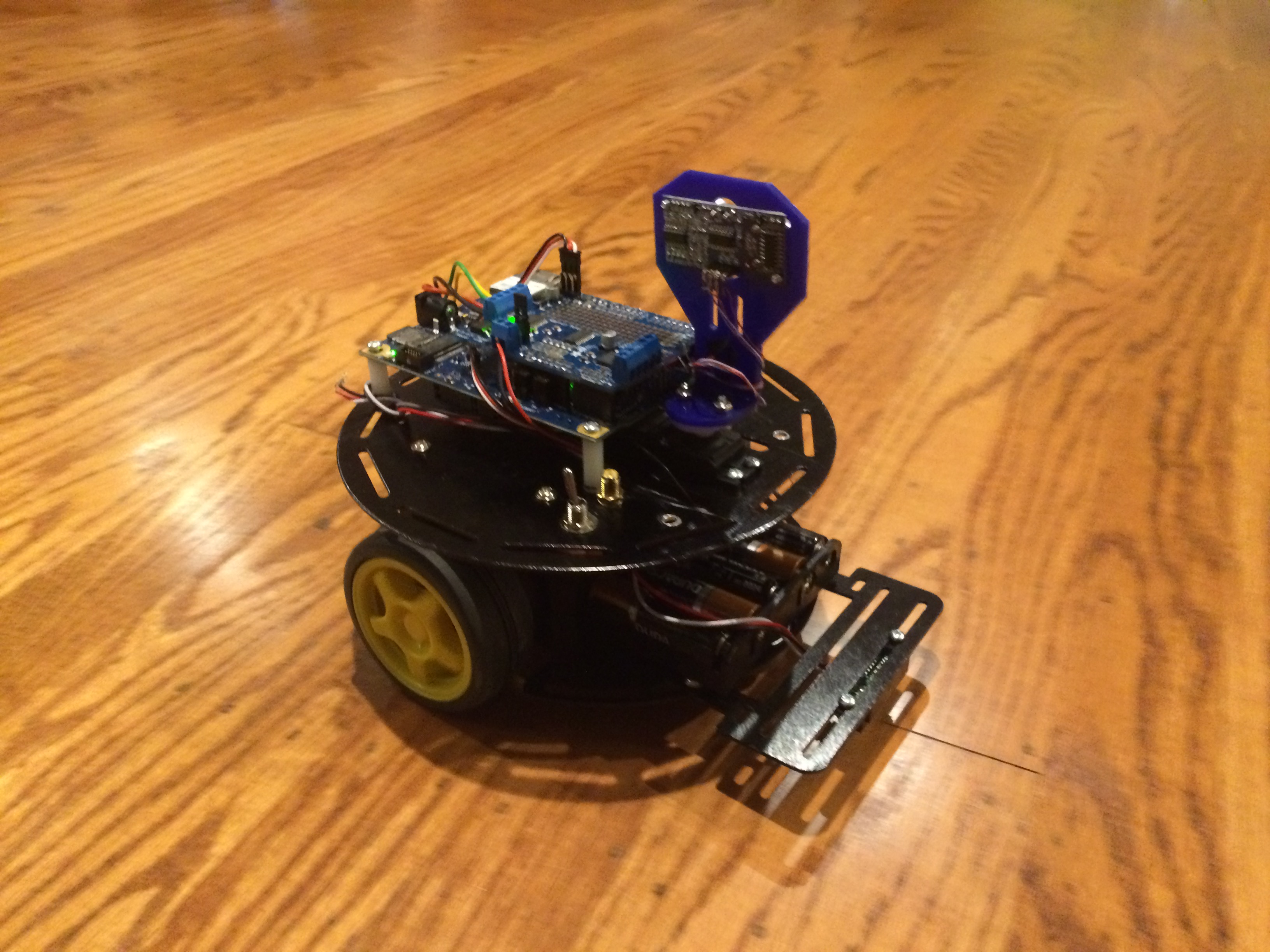
The 4WD was kind of hard to turn since all four wheels had to work right. The 2-wheel drive model was much easier to get to turn. We used a scanning sensor on a servo to did sweeps to look for obstacles. In comparison though the three sensors on the 4WD project did a better job.
- DF robot 2WD
- Intel Galileo 2
- Adafruit motor/servo shield
- Intel WiFi adapter
- half to full height mini card adapter
- antenna
- Ultrasonic distance sensor for cliff detection
- sensor bracket
- servo
- IR distance sensor
- toggle switch
- 4 AA batteries
Related Posts